Shipping accounts for nearly 3% of global CO₂ emissions. The pressure on fleet operators to decarbonize is no longer theoretical; it’s regulatory, financial, and commercial. CII ratings are tightening. FuelEU Maritime is coming into effect. Charterers increasingly ask for emissions data before they sign.
The industry knows it needs to act. The question is: with what?
Alternative fuels are part of the answer, but the infrastructure isn’t ready, the costs are steep, and the supply chains are still being built. In the meantime, there’s a proven, available, and often overlooked energy source that’s already there – everywhere ships sail.
Wind.
Wind-Assisted Propulsion: A Good Idea with a Practical Problem
Wind-assisted ship propulsion (WASP) has moved from concept to reality. Rotor sails, rigid sails, suction wings – several technologies are already operating on commercial vessels. They work. They reduce fuel consumption. But they all share one constraint: they operate at deck level, where wind is weakest.
At sea, wind speed increases dramatically with altitude. The maritime wind gradient reaches its full intensity at around 280 meters – where wind is substantially stronger and more consistent than at the 20–30 meters where deck-mounted systems operate. Accessing that altitude means accessing more energy, more reliably.
Kite systems were the first attempt to capture high-altitude wind for ships. But traditional soft kites – essentially large parafoils on a tether – are passive. They need wind to launch, wind to fly, and wind to land. Deployment takes up to 50 minutes. If wind drops mid-flight, the kite falls into the sea. For a commercial vessel on a tight schedule, that’s a reliability problem that’s hard to accept.
What WindtracX Is Building
We took a different approach. Instead of a passive kite, we built an active autonomous drone – with its own motors, propellers, and flight control, designed specifically to generate aerodynamic traction for ships.
The system takes off vertically from the ship’s deck, transitions to tethered dynamic flight at altitude, pulls the vessel forward through the tether, and lands autonomously when conditions require it. No crew intervention. No dependency on wind for launch or recovery. Operational in conditions up to Beaufort 8.
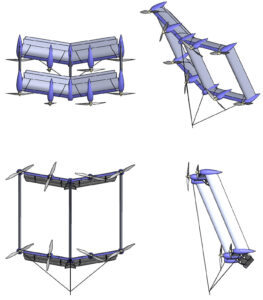
The core innovation is in the wing design. We use a closed-box wing geometry, a configuration in which the upper and lower wings connect at the tips, forming a continuous loop. This virtually eliminates the tip vortices that cause drag on conventional wings. The result is an exceptionally efficient airframe that generates high traction from a very compact structure.
How compact? To produce the same pulling force as a 100 m² traditional sail, our drone needs roughly 2.8 m² of wing surface. That’s not a theoretical projection; it’s what the aerodynamics deliver when you combine high-altitude wind, dynamic flight, and an optimized lift-to-drag ratio.
Why This Matters for Ship Operators
Fleet decarbonization decisions come down to practical questions. How much deck space does the system need? How does it integrate with existing operations? Does it require a specialized crew? What’s the maintenance profile? What happens when something goes wrong?
WindtracX is designed around these realities:
Minimal footprint. The drone’s wings fold for storage. The entire system occupies a fraction of the deck space that rigid sails or rotor systems require. For vessels where deck real estate is valuable or limited, this is a meaningful advantage.
Fully autonomous operation. From takeoff to landing, no human operator is needed. The system uses model predictive control to optimize its flight path in real time, continuously adjusting to wind changes. This means no additional crew, no specialized training, and no manual intervention during normal operation.
Active safety. Because the drone has its own propulsion, it doesn’t depend on wind to stay aloft or to land safely. If the tether breaks, the drone can glide and land independently. Redundant motors and control surfaces ensure the system remains controllable even if individual components fail. We’ve flight-tested motor-out scenarios, the drone handles them.
Energy efficiency. During certain phases of flight, the propellers operate as micro wind turbines, regenerating energy and recharging the onboard batteries. In optimized conditions, the system approaches near-neutral energy consumption, meaning it generates traction with minimal net power draw.
The Bigger Picture
Wind-assisted propulsion is not going to replace marine engines. But it doesn’t need to. Even a 10–20% reduction in fuel consumption translates into significant savings on fuel costs, measurable improvements in CII ratings, and a real reduction in emissions, all from a system that uses an energy source with zero fuel cost and zero supply chain risk.
The question for shipowners isn’t whether wind propulsion makes sense. The data on that is increasingly clear. The question is which technology delivers it in a way that fits real-world operations: compact enough to install without redesigning the vessel, reliable enough to run without babysitting, and efficient enough to make the economics work.
That’s what we’re building at WindtracX. A system that brings the performance advantages of high-altitude wind to commercial shipping, without the operational compromises that have held kite-based systems back.
We’re a Swiss deep-tech startup, backed by Innosuisse, with a team that combines aerospace engineering, autonomous systems, and advanced aerodynamics. We’re not building a concept. We’re building a product – tested in flight, validated in wind tunnels and CFD, and designed from day one for the realities of maritime operations.
Want the Full Technical Story?
Our CEO, Aldo Cattano, recently gave a detailed technical presentation covering the aerodynamics, the flight control architecture, and the test results behind our system. If you want to go deeper into engineering, it’s worth watching.
🎥 Watch the full presentation: Why We Built an Aero-Kite Drone?